LAPORAN
PENGENALAN KETINGGIAN FLUIDA (CRL)
1.
TUJUAN
PERCOBAAN
Setelah melakukan percobaan mahasiswan diharapkan
mampu :
Ø Menjelaskan
dan membedakan mode pengendalian kontinyu dan tidak kontinyu.
Ø Menjelaskan
terminology yang digunakan dalam pengendalian unit CRL.
Ø Memahami
prinsip pengendalian level air pada unit CRL.
Ø Melakukan
simulasi pengendalian dan menjelaskan grafik tersebut.
II.
ALAT DAN BAHAN YANG DIGUNAKAN
Ø
Seperangkat
peralatan CRL (Control
Regulation Level)
Ø
Compressor
Ø
Air dalam tangki penampungan
III.
DASAR TEORI
Peralatan simulasi proses CRL dibuat
oleh DIDACTA Italia dan dikembangkan untuk mempelajari teknik pengendalian
level (ketinggian) permukaan fluida cair, yang dalam hal ini fluida yang
digunakan adalh air. Konfigurasi yang digunakan untuk simulasi ini adalah
sistim loop terbuka (open loop) dan sistim loop tertutup (closed loop). Selain
itu, juga dipelajari mode pengendalian dengan pengendalian dengan pengendali
(controller) tak kontinyu (ON-OFF Controller) dan pengendali kontinyu (Three
tern-controller; P/I/D). Metode pengendalian terbagi atas :
a)
Pengendalian Diskontinyu, yang terbagi menjadi :
Ø Pengendali dua
posisi (on-off)
Ø Pengendali
dengan resitive probes
b)
Pengendali Kontinyu,
yang terbagi menjadi :
Ø Proporsional
(P), misal : pengendali flow, level
Ø Pengendali
proporsional Integral (PI), untuk flow, level, dan suhu
Ø Pengendali
pengendali Proporsional Derivatif (PD)
Ø Pengendali
Proporsional Integral Derivatif (PID)
PERALATAN CRL
Bagian-bagian
alat pengendali ketinggian fluida (CRL) dan gambar panel contoh pengendali
ketinggian fluida dapat dilihat pada halaman lampiran. Peralatan CRL ini
terdiri dari beberapa unit :
- Tangki
air kapasitas 20 liter
- Pompa
sentrifugasi dengan laju 20 liter/menit
- Katup
jenis PNEUMATIK proporsional dengan input 3-5 psi
- Transduser
I/P
- Inlet udara
tekan (dioperasikan pada 2 bar, min)
- Pengukur
tekanan udara tekan
- Alat
pengatur tekanan udara tekan secara manual
- Controller
elektronik MiniReng (alat tambahan)
- Peralatan
listrik (panel CRL)
- Computer
dan printer (aplikasi window)
- Tangki
bening berskala
- Katup
pengeluaran manual, V1 dan V2
- Transduser
P/I
- Katup
selenoid untuk input gangguan (disturbance)
- Sinyal
penggerak (actuating signal)
- Sinyal
variable yang dikendalikan (controller var, signal)
- Sinyal
gangguan (noise)
X. Sinyal Penggerak (actuating
signal)
Y. Sinyal variable yang
dikendalikan (controller var, signal)
N. Sinyal gangguan (noise)
Peralatan
simulasi proses CRL dibuat oleh DIDACTA Italia, dan dikembangkan untuk
mempelajari teknik pengendalian level ( ketinggian ) permukaan fluida cair yang
dalam hal ini fluida yanng digunakan adalah air. Konfigurasi yang digunakan
untuk simulasi ini adalah sistem loop terbuka (open loop) dan sistem loop
tertutup (closed loop). Selain itu juga dipelajari mode pengendalian
(controller) tak kontinyu (ON – OFF controller) dan pengendalian kontinyu three
– terms controller (P/I/D).
Air
yang berada di tangki dasar (1) dipompakan ke tangki bening berskala (ll) oleh
pompa sentrifugal (2) melalui katup pneumatic proporsional (3). Pengisian
tangki berskala (ll) menghasilkan tekanan pada bagian dasar tangki yang
ekivalen terhadap ketinggian (level) liquid dalam tangki, dideteksi oleh
transuder tekanan yang diubah ke arus listrik (P/I) (13) dan ditransmisikan
sebagai sinyal Y ke unit pengkondisi (panel) kontrol (9). Outputnya berupa
sinyal X yang
berasal dari panel kontrol (9) ditransmisikan ke katup (3) oleh transduser arus
yang diubah ke tekanan (I/P) (4) yang kemudian menggerakkan katup pneumatik
proporsional dengan bantuan udara tekan yang disuplai oleh inlet udara tekan
(5). Katup V1 dan V2 dapat diatur secara manual untuk menutup dan membuka penuh
dalam hubungan dengan tangki berskala (11). Katup selenoid (14) memungkinkan
untuk pengendalian gangguan aliran air. Untuk pemakaian katup selenoid (14), V1
harus dalam keadaan terbuka penuh.
PANEL
KONTROL
Panel
kontrol (9) terdiri dari beberapa
indikator yang menunjukkan kerja peralatan pada unit CRL ini, yaitu :
- Saklar
utama (main switch) yang mensulai arus listrik dari socket dinding ke
peralatan CRL.
- Lampu
indikator kerja pompa menunjukkan pompa sedang hidup.
- Lampu
indikator kerja level minimal dan maksimal untuk pemakaian resistive
probe. Resistive probe terletak di dalam tangki berskala berbentuk seperti
elektroda terbuat dari logam dalam 3 ukuran panjang berbeda.
- Penunjuk
ketinggian (level indikator) dalam satuan (%).
- Lampu
indikator, menunjukkan posisi katup untuk menimbulkan gangguan sesuai
posisi nomor.
Posisi selektor
NOISE (gangguan)
0 – Katup
solenoid tidak diaktifkan
Man – Katup
solenoid diaktifkan secara manual
PC - Katup solenoid dikendalikan melalui
komputer
- Sinyal
pengaturan , X, dalam bentuk output analog.
- Sinyal
yang dikendalikan , Y , Controller var dalam bentuk output analog.
- Selektor
pemilih untuk jenis mode control :
-
Pengendalian gerakan
katup secara manual
-
Unit Off (0), posisi
pengendali tidak hidup
-
Pengendalian dengan
resistive probes
-
Pengendalian dengan PC
( komputer)
-
Pengendalian dengan
Mini Reg ( alat tambahan)
-
Pengendalian dengan
MRRP (alat tambahan)
- Pengaturan
katup secara manual
- Pengaturan
katup secara manual.
- Lampu
penunjuk power suplai.
JENIS
PENGENDALIAN LEVEL
1.
PENGENDALIAN
ON-OFF
Pengendalian
yang paling sederhana adalah jenis ON – OFF, dimana penggerak (actuator) hanya
berada pada dua posisi ON (hidup) atau posisi OFF (mati). Pada unit CRL ini
diasumsikan actuator adalah katup pneumatik yang kanan berada pada posisi
membuka atau menutup aliran yang menuju tangki berskala.
Katup
akan terbuka apabila llevl air berada dibawah dari level yang diinginkan (set
point) dan katup menutup apabila level air melebihi dari set point. Disini akan
terdapat batasan level (level threshold) yang berhubungan dengan set point,
apabila batasan ini dilampaui karena level bertambah atau berkurang, katup juga
berubah posisinya. Hal ini akan menimbulkan perubahan posisi katup disekitar
batasan level, yang timbul pada pengeporasian normal. Ketika level sedikit di
bawah set point, katup akan teruka seingga level melebihi setpoint dengan
cepat, kemudian katup menutup dan level berkurang kembali dan seterusnya
berulang – ulang.
Untuk mengatasi
problem ini, dan mencegah ausnya penggerak (katup), ada baiknya diberikan dua
batasan level yang diukur secara simetris diatas dan dibawah setpoint.
-
Batasan atas dilampaui
apabila level meningkat, katup akan menutup
-
Batasan bawah dilampaui
apabila level berkurang, katup membuka
Interval antara
level yang dikehendaki dengan salah satu batas level
dinamakan dengan histerisis. Semakin
besar histerisis, semakin rendah tekanan
pada actuator pengendalian
dengan resistive probe juga merupakan pengendalian tidak kontinyu, namun
keadaan on/off pada pengendalian dengan resistive probe berbeda pada bagian
actuatornya. Pada resistive probe, posisi katup pneumatic akan terus terbuka,
gerakan hidup mati yang diperintahkan oleh controller berdasarkan hasil
evaluasi terhadap pengukuran ketinggian minimum atau maksimum menyebabkan pompa
sentrifugal mati atau hidup dalam usaha mempertahankan rentang histerisis
probes.
Tangki bening berskala unit CRL
mempunyai tiga buah probes didalamnya yang berfungsi untuk mengukur level
fluida (R1, R2, dan R3). R1 dan R2 dapat berfungsi sebagai batas atas pada
pengendalian on – off. Apabila
katup pengeluaran (V2) terbuka, tangki pada keadaan kosong dan selektor pada
panel kontrol (23) berada pada posisi sesuai resistive probes yaitu antara 0
dan PC, maka air akan mengalir mengisi tangki. Sistim akan membuka katup
pneumatik sebesar 100% sampai level mencapai R2 dan melewati batas bawah R2
tersebut, katup terbuka kembali, demikian berulang seperti pada pengendalian on
– off. R3 berada pada posisi level 85% sedangkan R2 pada level 75% kontrol pada
posisi 0.
2.
PENGENDALIAN
P/I/D
Sistem pengendalian
secara kontinyu berbeda dengan system pengendalian tak kontinyu (ON-OFF).pada
system control kontinyu, system control melakukan evaluasi antara error dan set
point dan secara kontinyu pula memberikan masukan (input) bagi eleman control
akhir untuk melakukan perubahan agar harga pengendalian (control point)
mendekati atau sama dengan harga set point.
Sistem
pengendalian kontinyu ini menggunakan kontinyu ini menggunakan tiga terminology
berikut :
- Proposional
- Integral
- Derivative
Sinyal yang diregulasi, yang
didasarkan atas error (perbedaan antara set point dengan control point)
ditentukan oleh jumlah ketiga definisi diatas.
Ø PROPOSIONAL
Bagian atau komponen mode
pengendali ini menyatakan eror yang terjadi sebanding antara set point dan
harga terukur.sebanding ini dinyatakan sebagai harga konstanta (Kp).
Ketika sinyal regulasi mencapai 100
% atau katup pneumatic terbuka penuh, eror mencapai level salurasi (jenuh),
penambahan eror tidak akan meningkatkan sinyal regulasi.
Disini perlu diketahui range
interval eror agar sinyal regulasi dapat beroperasi antara 0% -100%.range
variasi antara 0-PB, maka persen harga sinyal regulasi, X adalah
X=e.PB
Semakin besar
PB, semakin kecil keluaran controller (X), untuk error yang sama, dengan kata
lain, semakin rendah gain proposional controller.
Sistem pengendalian yang
hanya menggunakan mode proposional ini mempunyai ketentuan berikut :
a. Error
tidak dapat dieliminasi (dikurangi dan
sulit mencapai set point
b. Adanya
error sisa (residu) yang disebut OFFSET yang bertambah dengan bertambahnya PB.
Ciri-ciri
pengontrol proposional harus diperhatikan ketika pengontrol tersebut
diterapkan pada suatu sistem. Secara eksperimen, pengguna
pengontrol propoisional harus memperhatikan ketentuan-ketentuan
berikut ini :
1. Kalau nilai Kp kecil,
pengontrol proposional hanya mampu melakukan koreksi kesalahan yang
kecil, sehingga akan menghasilkan respon sisitem yang lambat.
2. Kalau nilai Kp dinaikan,
respon sistem menunjukan semakin cepat mencapai set point dan keadaan
stabil.
3. Namun jika nilai Kp
diperbesar sehingga mencapai harga yang berlebiahan, akan mengakibatkan sistem
bekerja tidak stabil, atau respon sistem akan berosolasi
Ø INTEGRAL
Mode control
integral selalu digunakan berpasangan dengan mode proposional dengan persamaan
:

Dengan mode
gabungan ini eror pertama-tama meningkatkan kemudian berkurang dengan cepat
oelh aksi proposional.error tidak akan menjadi nol dikarenakan oleh adanya
offset.aksi control integral akan mengurangi eror secara tunas, sedangkan
kondisi equilibrium baru memrlukan aliran masuk yang baru yang digerakkan oleh
mode integrasi juga.
Umumnya
mode gabungan ini digunakan ketika variable yang dikendalikan diharapkan
mngalami perubahan besar namun lambat yang memerlukan perubahan cukup besar
pada sinyal regulasi X. Ketika
digunakan, pengontrol integral mempunyai beberapa karakteristik
berikut ini:
1. Keluaran pengontrol
membutuhkan selang waktu tertentu, sehingga
pengontrol integral cenderung memperlambat respon.
2. Ketika sinyal kesalahan
berharga nol, keluaran pengontrol akan bertahan pada nilai sebelumnya.
3. Jika sinyal kesalahan tidak
berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang
dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki.
4. Konstanta integral Ki yang berharga besar
akan mempercepat hilangnya offset. Tetapi
semakin besar nilai konstanta Ki akan mengakibatkanpeningkatan osilasi dari
sinyal keluaran pengontrol.
Ø DERIVATIF
Mode derivative juga dipergunakan
bergabung dengan mode proposional dengan persamaan:
Jika error
konstan, derivative sebagai fungsi waktu akan mempunyai harga nol (tidak ada
output).mode proposional derivative ini digunakan apabila diharapkan perubahan
yang cepat dan dalam batas level yang
diizinkan.oleh karena level control mempunyai variasi beban yang rada lambat,
penggunaan mode proposional derivative kurang memberikan pengertian yang jelas.
Mode gabungan yang melibatkan
derivative yang digunakan pada CRL adalah mode gabungan atau PID (proposional,
integral, derivative) dengan persamaan :

Gabungan
ketiganya disini memberikan kemungkinan pengendalian yang sempurna dan
menghasilkan pengendalian yang optimal.
Karakteristik pengontrol derivative adalah
sebagai berikut:
1. Pengontrol ini tidak
dapat menghasilkan keluaran bila tidak ada perubahan pada masukannya (berupa
sinyal kesalahan).
2. Jika sinyal kesalahan
berubah terhadap waktu, maka keluaran yang dihasilkan pengontrol tergantung
pada nilai Td dan laju perubahan sinyal kesalahan.
3. Pengontrol derivative mempunyai
suatu karakter untuk mendahului, sehingga pengontrol ini dapat menghasilkan
koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi
pengontrol derivative dapat mengantisipasi pembangkit kesalahan,
memberikan aksi yang bersifat korektif, dan cenderung meningkatkan stabilitas
sistem.
Berdasarkan
karakteristik pengontrol tersebut, pengontrol derivative umumnya
dipakai untuk mempercepat respon awal suatu sistem, tetapi tidak memperkecil
kesalahan pada keadaan stabilnya. Kerja
pengontrol derivative hanyalah efektif pada lingkup yang sempit,
yaitu pada periode peralihan. Oleh sebab itu
pengontrol derivative tidak pernah digunakan tanpa ada pengontrol
lain sebuah sistem. Efek dari
setiap pengontrol Proporsional, Integral dan Derivatif pada sistem lup tertutup
disimpulkan pada table berikut ini :

Setiap kekurangan dan kelebihan dari
masing-masing pengontrol P, I dan D dapat saling menutupi dengan menggabungkan
ketiganya secara paralel menjadi pengontrol proporsional plus integral plus
diferensial (pengontrol PID). Elemen-elemen pengontrol P, I dan D masing-masing
secara keseluruhan bertujuan :
1.
Mempercepat reaksi sebuah sistem mencapai set
point-nya.
2.
Menghilangkan offset.
3.
Menghasilkan perubahan awal yang besar dan mengurangi overshoot.
Kita coba
ambil contoh dari pengukuran temperatur, setelah terjadinya pengukuran dan
pengukuran kesalahan maka kontroler akan memustuskan seberapa banyak posisi tap
akan bergeser atau berubah. Ketika kontroler membiarkan valve dalam keadaan
terbuka, dan bisa saja kontroler membuka sebagian dari valve jika hanya
dibutuhkan air yang hangat, akan tetapi jika yang dibutuhkan adalah air panas,
maka valve akan terbuka secara penuh. Ini adalah contoh dari proportional
control. Dan jika ternyata dalam prosesnya air panas yang diharapkan ada
datangnya kurang cepat maka controler bisa mempercepat proses pengiriman air
panas dengan membuka valve lebih besar atau menguatkan pompa, inilah yang
disebut dengan intergral kontrol.
Karakteristik pengontrol PID sangat dipengaruhi
oleh kontribusi besar dari ketiga parameter P, I dan D. Penyetelan konstanta Kp,
Ki dan Kd akan mengakibatkan penonjolan sifat dari masing-masing elemen. Satu
atau dua dari ketiga konstanta tersebut dapat disetel lebih menonjol disbanding
yang lain. Konstanta yang menonjol itulah akan memberikan kontribusi pengaruh
pada respon sistem secara keseluruhan. Adapun beberapa grafik dapat menunjukkan
bagaimana respon dari sitem terhadap perubahan Kp, Ki dan Kd sebagai berikut

PID Controler adalah controler yang
penting yang sering digunakan dalam industri. Sistem pengendalian menjadi
bagian yang tidak bisa terpisahkan dalam proses kehidupan ini khususnya dalam
bidang rekayasa industri, karena dengan bantuan sistem pengendalian maka
hasil yang diinginkan dapat terwujud. Sistem pengendalian dibutuhkan untuk
memperbaiki tanggapan sistem dinamik agar didapat sinyal keluaran seperti yang
diinginkan. Sistem kendali yang baik mempunyai tanggapan yang baik terhadap
sinyal masukan yang beragam.
VI.
PROSEDUR
KERJA
1. Menghidupkan CRL dengan menekan tombol MAIN SWITCH.
Lampu merah akan menyala.
2. Membuka
katup VI dan V2 dan mengkosongkan volume tangki.
3. Mengubah mode selector (24) di panel control ke resistive probes dan mengklik tombol start untuk memulai.
4. Memperhatikan bahwa pompa hidup apabila ketinggian air
berada dibawah batas atas. Pompa akan mati saat ketinggian air menyentuh bagian
bawah dari probes. Mencatat waktu mulai dari pompa mati hingga pompa hidup
kembali (t1) dan mencatat waktu pompa mulai hidup hingga pompa mati
kembali (t2).
5. Mengulangi pengamatan waktu hidup dan mati pompa pada
ketinggian resistive, hingga mendapat 3x data yang identik.
6. Mengukur diameter, tinggi maksimum, dan minimum untuk
menentukan volume.
7. Menghitung laju kenaikan dan laju pengosongan air
dalam tangki.
8. Menentukan laju alir masuk dan laju alir keluar.
I V.
DATA
PENGAMATAN
Diketahui :
-
Tinggi tangki = 60 cm
-
Diameter tangki = 14,5 cm
-
Batas atas =
85%
-
Batas bawah = 75%
-
Diameter = 14,5 cm , jadi r = 7,25 cm
-
h ( tinggi ) dari bawah
ke batas atas = 7 cm

Ø Dari
20 data diambil 3 data yang identik yaitu :

SKEMA ALAT PENGENDALIAN LEVEL (CRL)

VI.
PERHITUNGAN



VII.
ANALISA PERCOBAAN
Suatu
pengendalian proses sangat diperlukan dalam proses industri untuk menjaga agar
proses yang berlangsung sesuai denan yang diharapkan. Salah satu bentuk
pengendalian yang ada di industri yaitu pengendalian level. Tujuannya untuk
menjaga keamanan baik bagi pekerja maupun warga sekitar. Ketinggian permukaan
level zat cair di dalam suatu tangki atau volume dalam reactor maupun boiler
diukur agar volume dalam tangki dapat diketahui.
CRL
adalah suatu peralatan pengendalian level yang memanfaatkan sinyal tekanan
dalam suatu aliran fluida. Alat ini dihubungkan dengan Personal Computer sebagai media pemantau jalannya proses
pengendalian ketinggian, namun pada praktikum kali ini tidak menggunakan
personal computer jadi proses pengendalian dilakukan secara manual. Pada bagian
bawah tangki berskala dapat dilihat adanya katup v1 dan v2 yang dapat diatur
secara manual untuk tertutup dan terbuka penuh dalam hubungan dengan tangki
berskala. Katup solenoid yang ada pada peralatan digunakan untuk mengatur
pengendalian aliran air. Katup v1 harus dalam keadaan terbuka penuh. Kemudian
mengisi tangki sampai batas 85 dan mengosongkannya kembali guna untuk
mendapatkan waktu laju alir masuk dan laju alir keluar.
Pengendalian
level ini memiliki sensor atas dan bawah pada batas tertentu, yang akan terbaca
pada controller. Pengukuran yang dilakukan oleh level transmitter (LT) akan dengan cepat menginformasikan sinyal
ketinggian cairan dalam tangki dan mengubahnya menjadi sinyal kontrol bagi level controller (LC) yang akan
mengevaluasi hasil pengukuran terhadap set point dan memberikan output
controller (%P) kepada katup control untuk memperbesar atau memperkecil aliran
cairan ke tangki. Apabila cairan sudah mencapai batas atas, itu artinya volume
maksimum sudah tercapai dan otomatis pompa akan mati sendiri. Sedangkan apabila
cairan telah mencapai batas bawah, pompa akan mendapatkan sinyal untuk hidup
kembali.
Pada
pengendalian proses (praktikum) di laboratorium digunakan alat CRL (Control Regulation Level). Pada tangki
pengukuran level, terdapat tiga elektroda logam (probes). Namun pada praktikum
ini digunakan dua elektroda logam (probes) karena dilakukan sebagai
pengendalian dua posisi. Elektroda ini berfungsi sebagai sensor level, baik itu
batas bawah dan batas atas. Apabila batas atas terkena aim aka pompa akan mati
karena mendapat sensor dari probes. Sedangkan jika batas bawah tidak terkena
air, maka pompa akan hidup. Pada alat telah disetting untuk batas atas yaitu
85% dan untuk batas bawah yaitu 75%. Dengan demikian saat air dipompakan dari
tangki penampung akan mulai mengisi bagian tangki bening berskala tetap terus
mengalir sampai fluida (air) menyentuh elektroda batas atas (85%). Saat fluida
menunjukkan angka 85% pada skala tangki bening, maka pompa akan berhenti
bekerja yang mengakibatkan air tidak keluar lagi. Namun pada bagian bawah
tangki terdapat pipa keluaran air yang berfungsi untuk menjaga keseimbangan
volume air. Saat air yang tetap turun kebagian bawah tangki memungkinkan volume
air didalam tangki terus berkurang. Namun saat air mulai menyentuh elektroda
batas bawah (75%) air kembali terisi ke dalam tangki bening berskala tersebut
hingga saat telah mencapai batas atas (85%), maka pompa akan kembali hidup
sehingga air terisi kembali ke dalam tangki. Begitu seterusnya, adanya batas
atas dan batas bawah ini akan menjaga level air dalam tangki agar tidak kurang
ataupun terlalu meluber.
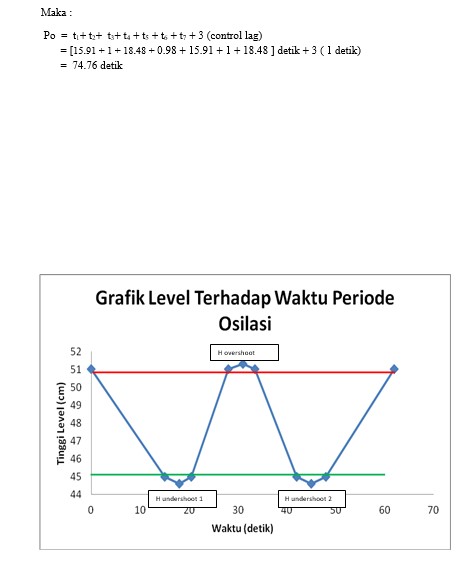
Dari
grafik level terhadap waktu periode osilasi akan didapatkan bentuk grafik yaitu
seperti bukit yang naik turun, yang menunjukkan waktu untuk mencapai batas atas
(85%) dan batas bawah (75%) pada alat pengendalian level (CRL). Dapat dilihat
bahwa waktu yang dibutuhkan fluida untuk mencapai batas atas dan batas bawah
itu hampir sama sekitar 21 menit.
VIII.
KESIMPULAN
Dari percobaan yang
dilakukan dapat disimpulkan bahwa :
·
CRL adalah suatu
peralatan pengendalian level yang memanfaatkan sinyal tekanan dalam suatu
aliran fluida.
·
Pengendalian
level bertujuan untuk menhaga level cairan di dalam suatu tangki agar cairan
tidak terlalu kosong atau terlalu penuh.
·
Air akan
mengalir ke dalam tabung apabila level air di dalam tangki mulai menyentuh
elektroda batas bawah dan akan berhenti mengalir saat level air mulai menyentuh
elektroda batas atas.
IX.
DAFTAR
PUSTAKA
Jobsheet.2015. “Penunjuk Praktikum
Pengendalian
Proses”. Politeknik
Negeri Sriwijaya: Palembang

No comments:
Post a Comment